




































高効率なリカンベント自転車の人間工学的設計(ロボット・メカトロニクス学科 教授 高尾秀伸)
パーソナルモビリティの可能性を広げ、より健康長寿で低炭素な社会を目指して、人間の力を無駄なく伝達できるリカンベント自転車の研究を行なっています。
リカンベント自転車とは、背もたれ付きのシートに仰向け姿勢で乗車する自転車のことです。通常の自転車に比べて低い乗車姿勢がとれるため、前面投影面積を抑えることができ、効率的にスピードを出すことが可能です。条件が整えば、その最高スピードは時速140キロにも及びます。また、リクライニング乗車姿勢をとることにより、上半身の負担を軽減できると考えられます。しかし、操縦者の力を最大限に発揮するための最適な設計条件についてはこれまでほとんど研究されてきませんでした。人間の力を無駄なく伝達できる自転車が実現すれば、パーソナルモビリティの可能性を広げ、健康長寿で低炭素な社会づくりに貢献することが期待されます。
そこで、本研究では効率的に人間の力を伝達するためのリカンベント自転車の設計条件を研究しています。リカンベント自転車において人間-機械系のインタフェースが存在するのは、足が接するペダル・クランク部、臀部・体幹が接するシート部、そして手が接するハンドル部です。このうち、我々はペダル・クランク部とシート部の関係性に着目しました。
具体的には背もたれの角度およびクランク長を変化させた場合のエネルギー消費効率と代謝性の筋負担度を評価しました。エネルギー消費効率は自動代謝分析装置を用いた酸素消費量から算出しました。代謝性の筋負担度は血中乳酸値を測定し、乳酸性作業閾値(LT)が観測された時点のパワーを指

ロボット・メカトロニクス学科 高尾秀伸 教授

運動強度を段階的に上げて行く形で実験を行なった結果、個人差はあるものの、従来のクランク長である170mmに比べて、35mm長い205mmは総じてエネルギー消費効率が高くなりました。図2の例では背もたれ角度が40度のとき、最大約7%向上していました。
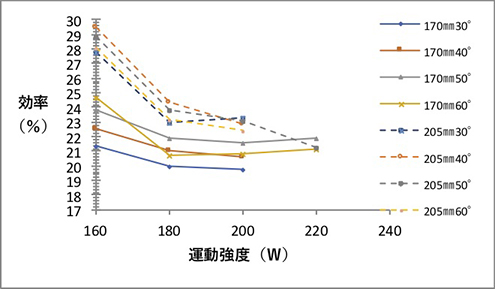
図2 エネルギー消費効率(実験協力者A)
また、LTパワーは図3の例では背もたれ角度40および50度・205mmクランク条件は20W向上していました。これは同じ運動負荷条件下で205mmクランクの方が代謝性の筋負担が低かったことを示しています。
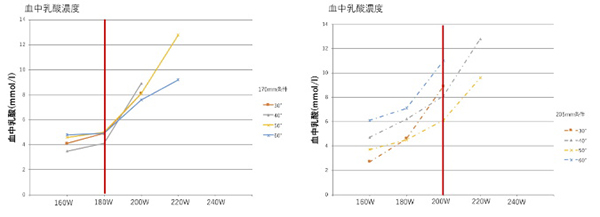
図3 クランク長ごとの血中乳酸閾値の変化(左:170mm、右:205mm、実験協力者A) (赤い縦線の箇所が乳酸閾値)
以上より、従来のクランクから30mmほど延長したクランクを用いると、背もたれの角度が40〜50 度の場合、最大10%程度エネルギー消費効率を向上させ、代謝性の筋負担を低減できる可能性があることが明らかになりました。
→