




































腰部負荷軽減システムの開発(ロボット・メカトロニクス学科 教授 兵頭 和人)
本研究では、介護をする人が長時間着用することができるように小型で軽量な腰の負担を軽減するシステムの開発を行っています。

ロボット・メカトロニクス学科 兵頭 和人教授
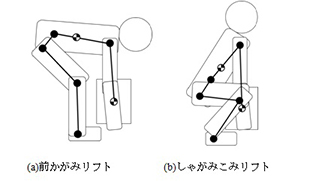
介護をする人が腰痛を悪化させる原因に1つが「前かがみリフト」(図1の(a))と呼ばれる抱きかかえ姿勢をとって介助動作行ってしまうことと言われています。
また、介護動作を補助する目的で開発されたシステムは数多くありますが、モータを使用しているためのシステム自体が重く、長時間着用する事が出来ないという問題をかかえていました。
一方ゴムを用いたアシストシステムでは小型で軽量な利点がありますがゴムの収縮力でアシストを行っているため、姿勢によっては逆効果になってしまう場合があります。
これらの問題を解決するために図2に示す構成の腰部負荷軽減システムを開発しました。開発したシステムではアシスト力は空気圧式のゴム人工筋で発生しています。
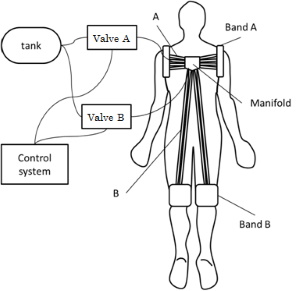
本システムでは背中の筋肉の補助をするための人工筋(図2のB)と胸を張るための人工筋(図2のA)を使って抱き上げ動作の補助をしています。ゴム人工筋ですので空気圧を加えていない時は介護者の動きを阻害することはありません。
持ち上げ動作の検出や前かがみになっているかの判別は靴に取り付けた荷重センサによって総重量と前後の比率を検出することで行っています。
このシステムでは以下の手順で抱き上げ動作の補助を行っています。
①荷重センサにデータから抱き上げ動作を検出
②胸を張るための人工筋を駆動
③背中の筋肉のアシストを駆動(前かがみになっていると強くアシストします)
そのため抱き上げ操作を行う時に「しゃがみこみリフト」(図1の(b))へ誘導されて腰を痛める原因を回避しています。
人工筋を駆動するための空気圧の供給源は約15回分の抱き上げ動作をアシストするためのタンクを使用しています。そのためシステムの重量は1.2[Kg]と軽量なため長時間の使用が可能となっています。
また、他のアシストスーツの様にフレーム(骨格)を持たない構造ですので、服の下に着ることが可能となっています。
図3に抱き上げ動作を行った時の本システムを装着した場合としない場合での腰の角度(直立状態が0度)の実験結果を示します。本システムを装着することによって腰の負担が大きい角度(注)の状態を超える状態を素早く通過できていることが分かります。
(注)同じ体重の人を持ち上げる場合でも、腰の角度が10度の時に比べて腰の角度が40度の時は背中の筋肉への負担は約4倍になります。
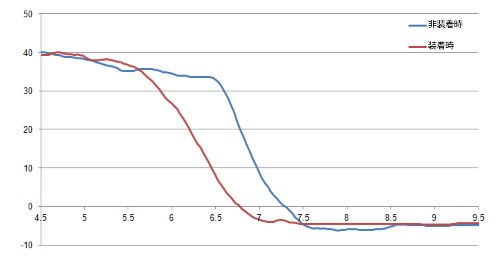 図3
図3