



































レーザーレンジセンサによる人追従ロボットの開発(ロボット・メカトロニクス学科 河原崎徳之教授)
本研究は,レーザーレンジセンサを用いた人の認識および追従機能を持つロボットの開発を目的とする.このようなロボットシステムは,高齢者のための買い物支援ロボットや案内ロボットへの応用が期待できる.
ロボット・メカトロニクス学科 河原崎徳之教授
----------------------
少子高齢化が進む我が国において,高齢者の生活を支援する機器の開発は重要である.我々は,店舗や公共施設において,高齢者が一人で買い物をする際に助けとなる"買い物支援ロボット"の開発を大きな目標としている."買い物支援ロボット"は,スーパーマーケットの買い物カートにモータとセンサを取り付け,使用者をセンサで認識し,使用者の後を一定の間隔でついていく機能を持たせたものである.このように買い物カートが人の後ろをついてきてくれれば,筋力の衰えた高齢者だけでなく,ベビーカーを押していて買い物カートを利用できない方にも便利なものになる.
本研究の目的は,"買い物支援ロボット"に必要な人の認識と追従機能を持つ人追従ロボットを開発することである.一般的に,人の認識には画像情報を使用することが多い.しかし,本ロボットは,店舗や公共施設など不特定多数の人たちの中で使用するため,画像の使用はプライバシーの問題がある.そこで,レーザーレンジセンサにより,対象者の認識と追従を行わせることとした.レーザーレンジセンサは,一平面上の形状状態を計測するセンサで,ロボット周囲の空間情報を得ることができる.このため,周囲の空間情報から障害物回避経路を生成し,ロボットに障害物との衝突回避機能を持たせることもできる.
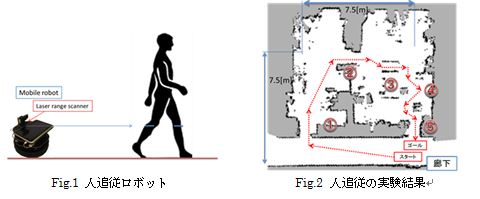
尚,使用するレーザーレンジセンサは,移動ロボット用に使用されているFDA/IECレーザ安全規格のクラス1であり,通常の操作条件下で安全なレーザとみなされているものである.本ロボットシステムは,対向二輪型移動ロボット,レーザーレンジセンサおよび制御用コンピュータから成る.最初に,対象者がロボット前方に立位で待機すると,ロボットシステムは,レーザーレンジセンサにより対象者の脛を検出する.センサが検出する対象者の脛の形状は,特徴的な三日月形になる.対象者が歩くのに従って,本システムは,この特徴的な脛の形状から対象者の位置や速度を逐次計測し,対象者と一定の距離を保つように適切な速度でロボットを動作させる(Fig.1).尚,対象者の位置と速度から次の位置を推定しているので,短時間であれば,対象者が障害物に隠される,対象者の前を人が横切る場合でも正しく対象者を追従することができる.
さらに,周囲の空間情報から障害物との衝突回避も行う.大学の研究室内で動作実験を行った結果をFig.2に示す.レーザーレンジセンサによる空間情報から,ロボット周囲の環境地図が作成でき,障害物を回避しながら対象者を追従することができた.今後は,本ロボットシステムを買い物カートに改良して,実用的な"買い物支援ロボット"を開発する予定である.