




































数秒先を読むロボット――混雑空間で安全に走る「予測」のしくみ(健康福祉支援開発センター/情報システム学科 准教授 吉留 忠史)
近年、レストランで働く配膳ロボットやショッピングモールで働く案内ロボット、警備・清掃ロボットなどを街中で見かける機会が増えました。これはコンピュータの処理能力向上に加え、LiDARなどの高性能なセンサの低価格化、小型・軽量・高エネルギー密度なバッテリー技術の進化によって支えられています。しかし、ロボットが人と同じ環境で働くためには「安全性の確保」が最優先課題です。屋内のような比較的低速で移動体の少ない環境は、従来の障害物回避技術でも十分通用してきましたが、屋外や混雑した施設では事情が異なります。そこには歩行者、ペット、車椅子、自転車、バイク、自動車など多種多様な形状と速度を持つ物体が混在しているからです。
今回は、ロボットが「今、目の前にある障害物」を避けるだけの段階から、数秒後の未来を予見して動く「衝突予測コストマップ」を使って自律移動ロボットの安全性を高めていくという研究を紹介します。
情報システム学科
吉留忠史准教授
安全性の確保
従来、工場などで働く産業用ロボットは、物理的な隔離(柵など)によって人の安全を確保してきました。しかし、現代のサービスロボットは異なります。配膳ロボットなどは人が行き交う環境で働いていて、時にはユーザーが直接タッチパネルやスイッチに触れることもあります。人は周囲を自由に動き回ることができるため、ロボットにとってその動きを予測することは難しく、衝突する可能性が常に付きまといます。現在は、LiDARなどのセンサで周囲を測定して物体を検知すると、その距離に応じて減速や停止することで衝突の影響を抑えています。しかし、頻繁に減速と停止を繰り返してばかりではスムーズな運用は困難です。人間の行動を思い出してみると周囲に注意を払うことで、人や物をうまく避けながら、大きく減速することなく目的地にたどり着くことができます。真の安全性とは、人や物に対して衝突しないように回避すること、衝突しても相手を傷つけないことに加えて、スムーズに目的を果たすことが大切です。
危険度を示したコストマップ
障害物を回避するための技術は様々ありますが、ロボット開発に使用されるROS2のNavigation2で使用されている技術に「コストマップ」という考え方があります。壁や柱などの構造物や静止物をLiDARやカメラによって測定して、見取り図のような画像を作成します。これを環境地図と言います。図1中の黒線が壁や柱です。黒線の周囲に水色や赤紫、青紫の色が付いています。これが通行の危険度や困難度を示すコストであり、水色がロボットの大きさを考慮して絶対に近づいてはいけない領域、赤紫が可能であればあまり近づきたくない危険予知領域、青紫が比較的安全で、障害物を意識しつつも走行に支障がない安全領域を示しています。この構造物や静止物に対するコストマップをグローバルコストマップと呼びます。ロボットは現在位置から目的地をできるだけ短い距離で障害物にぶつからないように走行ルートを計算します。
元々その場所には存在しない静止物や移動体に対しても、同じようにコストマップを生成します。ただし、見える範囲、つまりセンサで測定できる範囲の物体に対してリアルタイムにコストマップを生成し、その物体を回避するように走行ルートを計算します。ロボット周囲の静止物や移動体に対するコストマップをローカルコストマップと呼びます。図1中の色の濃い部分が該当します。グローバルコストマップを使って大まかなルートを決定し、ローカルコストマップを使って未知の障害物に対して回避するようにルートを修正することで、ロボットは安全かつ効率的に目的地に到達することができます。
図1 障害物回避のためのコストマップ
壁や柱などの構造物(黒線:環境地図)に対し、ロボットが近づけない領域(水色)と、危険度に応じた緩衝領域(赤紫・青紫)を設定した例。グローバルコストマップは環境地図に基づき大まかな経路を計画し、ローカルコストマップはセンサで検知した周囲の障害物を反映して経路をリアルタイムに修正する。

移動体の速度を考慮した衝突予測コストマップ
ローカルコストマップを使えば周囲の障害物を回避するようにルートを修正しますが、ある一瞬を切り取る写真と同じように、静止して見える物体の位置からコストマップを計算しています。つまり、移動体の速度は考慮されていません。移動体がゆっくり移動していればルートの修正が間に合って避けられるかもしれませんが、速く移動していればルートの修正が間に合わず避けられないかもしれません。高速に動く物体が目の前に来れば避ける時間が無く衝突してしまいます。しかし、物体がまだ少し遠くにある段階で、その移動体の速度と動線、そして自分の移動速度から「このまま進めばぶつかってしまう」ことを予測できれば、速度を緩めたり、早めに止まったり、ルートを変えたりして衝突を回避できるでしょう。つまり、移動体のコスト領域に進入する前に、未来の衝突を判定して走行ルートを変えるように工夫します。
具体的には、「衝突予測コストマップ」を追加して走行ルートの修正を試みます。まずはセンサの連続データから移動体の速度と移動方向を算出します。次にロボットの走行ルートと移動体の予測ルートが重なる場所を調べ、両者がその位置に同じ時刻に到達するならば危険であると判定し、その衝突予測位置に「予測コスト」を発生させます。移動体の動きの誤差も考慮し、コストに広がりを持たせることで、未来に衝突しそうな場所の周辺に近づかないようにし、人間が直感的に「このままではぶつかる」と判断して避けるような、高度な先読み回避が可能になります。さらに衝突すると判定した移動体に対してだけ予測コストを発生させ、衝突しないものには発生させないことで、危険と判定した対象に対してのみ、回避動作を早い段階で開始するようにします。このコストを全移動体に対して記録したものが衝突予測コストマップです。
このように、単なる現在の静止画的な把握に留まらず、時間軸も含めた衝突予測コストマップを導入することで、ロボットは動的な環境下において、未来のリスクを回避し、停滞のないスムーズな自動移動を実現できます。
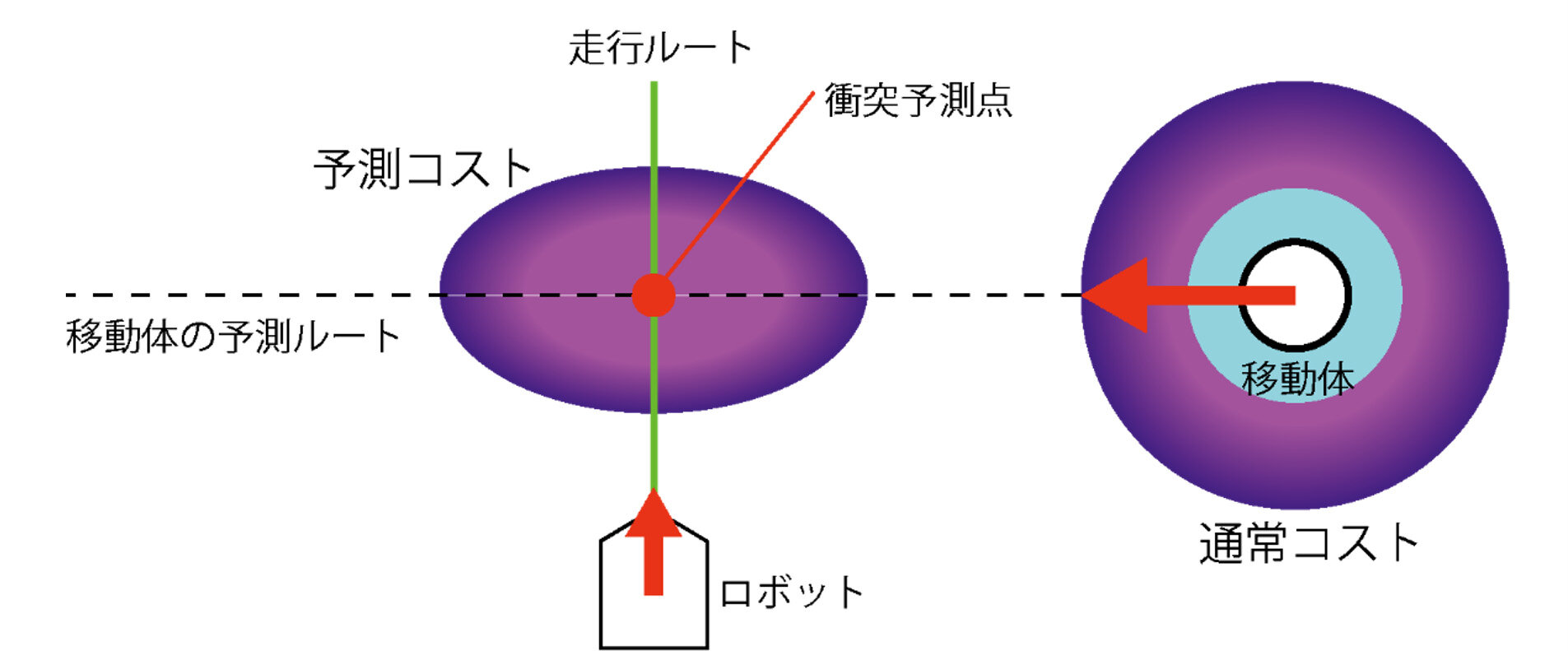
図2 衝突予測コストマップの概念
移動体の速度・方向から将来の衝突点を予測し、その位置に「予測コスト」を付与して早期回避につなげる。
目指せ、渋谷のスクランブル交差点!「ぶつからない」のその先へ
現在は、図3のように移動体の移動速度と方向を計測し、疑似的な予測コストとして反映させる実装段階にあります。今後はこの「衝突予測コストマップ」を完成させ、より複雑な環境での実証実験を進めていく予定です。この技術が完成した先にある究極の目標は、世界で最も過密な渋谷のスクランブル交差点を誰にもぶつからず、そして誰の邪魔をせずスムーズに渡りきることです。そんな未来の実現に向けて研究していきます。
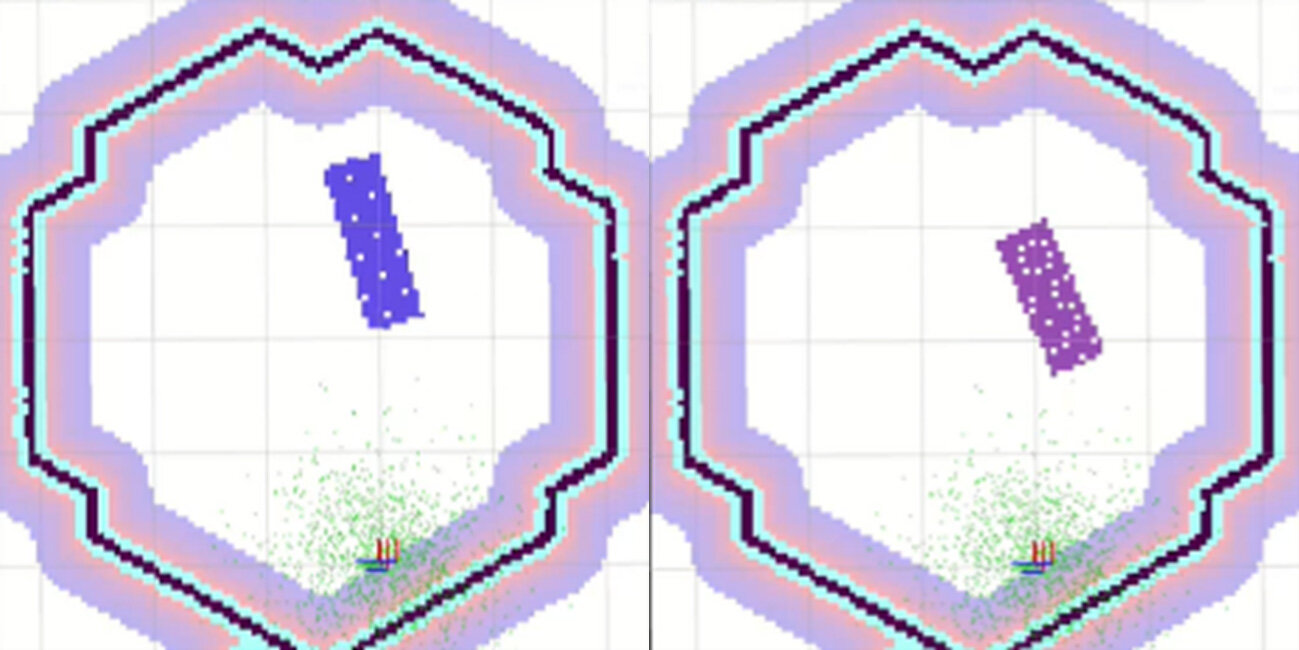
図3 衝突予測コストマップ
移動体の速度・方向から疑似的な予測コスト(紫)として反映する。
下方の赤/青の線はロボット本体を示し、周囲の緑の点は自己位置推定に使用されるパーティクルを示す。
▼本件に関する問い合わせ先
研究推進機構 研究広報部門
E-mail:ken-koho@mlst.kanagawa-it.ac.jp
▼関連するSDGs

