

屋内自立行動ロボットの開発
社会的背景
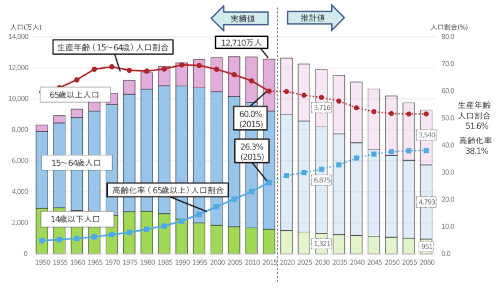
日本の総人口が2008年にピークに達して以降、減少の一途にある中、生産年齢(15~64歳)の人口は1995年の8,700万人をピークに減少しており、2056年には5,000万人を割ることが予測されている。総人口に対する割合は約50%である。一方で 、2025年に総人口の約30%が65歳以上となり、今後も高齢化率は増え続け、2060年に約40%と予測されている。超高齢社会となり、生産年齢人口が減少すると、労働力が不足することが問題となっている。その対策として、ロボットやAIの導入が求められている。
自立行動ロボットの開発
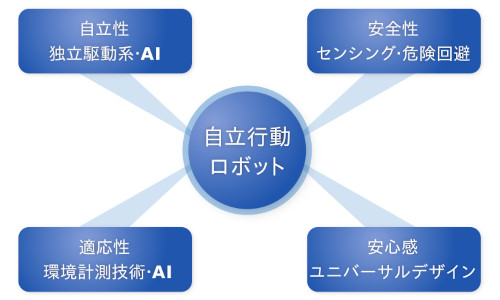
従来の産業用ロボットは、生産性の向上、過酷・危険・重労働からの解放、品質の向上と均一化を図るために、人の代わりとなる存在であった。これからのロボットは人の助けとなる存在であり、労働力が不足しているところに人と協働するサービスロボットや生活支援ロボットを導入することが望まれている。協働するロボットは、自立性、適応性、安全性、安心感を備え持ち、自律して行動することが必要である。本研究では、自立性を持つ自律制御ロボットのことを「自立行動ロボット」と呼ぶ。
【自立性】独立した電源(バッテリー)を備え、自由に動き回ることができる
【安全性】人、物、ロボット自身に損傷を与えないよう危険を回避する
【適応性】ロボット自身が考え、環境の変化やトラブルに対応できる
【安心感】不安を与えない形状・動き・稼動音、簡単な操作、見守る必要がない
建設業への応用
高度成長期に建てられた建築物が老朽化していき、再建築が必要となっている中で、建設業の労働力不足は大変深刻な問題となっている。建設現場での作業員はもちろん、技術者や建築後のサービス業も不足している。これまで人が行ってきた労働の一部を自立行動ロボットに任せることで、労働力不足を補い、長時間労働の解消や余剰時間の有効活用によって生産性が上がることが期待できる。
- 建築中から建築後の施工状態の記録や解析をするために躯体形状を計測する※
- 資材やコンクリート片が落ちている中で清掃する
- 異状を確認するために巡回する
- 客を目的地まで適切なルートで案内する
※鹿島建設株式会社と共同研究開発中
天井形状計測ロボットの開発へ
鹿島建設株式会社と我々研究グループは「天井形状計測ロボット」を共同開発している。2021年、神奈川工科大学構内に完成したKAIT広場は、天井が約50m×80mの巨大な鉄の一枚板であり、これを周囲の壁のみで支え、内部に支柱が無い構造のため、熱膨張によって天井の高さが大きく変化することが分かっている。施工会社である鹿島建設株式会社は、膨張による形状変化に対してシミュレーションを行っているが、世界に例を見ない構造であるため、天井形状の時系列変化を計測・記録したいという要求を持っている。さらに、「ロボットにより自動的に計測する」、「非技術者でも使用できる」、「天井までの高さをミリオーダーの精度で計測する」、という要求がある。これらの要求に対し、3次元LiDARを使用した天井計測システムを搭載した自立行動ロボットの開発を行う。自立走行には自己位置推定が必要不可欠な技術であるが、多目的広場には柱や内壁がなく、床はすり鉢状に傾斜しているため、自己位置推定に必要な建物内の特徴物がほとんど無い。そこで、天井に不規則に並んだ天窓を手掛かりに自己位置推定する手法を研究する。また、天井計測システムは3次元LiDARによって床から天井までの高さを計測し、測定した点群データに対してノイズ除去と、高さ計測の精度向上を目指したシステムを開発する。
研究計画内容
以下の課題を設定し、期間内に自立行動ロボットの開発と天井計測システムの開発・導入を図る。
- 小回りが利き、傾斜面でも行動できる「四輪独立操舵・駆動型移動ロボット」(自立性)
- 特徴物の少ない環境でも自律的に行動することができる「自己位置推定」能力(適応性)
- 周囲の状況を把握し、 障害物等の危険を回避する(安全性)
- 人の手で持ち運びができるようにするためコンパクトで軽量なロボット(安心感)
- 非技術者でも簡単に操作することができるユニバーサルデザイン・インタフェース(安心感)
- 建物内の壁面、天井、床面などの施工状態を 3次元LiDARによって測定する
- ノイズ除去と精度向上のための測定データのスムージング処理
- 5G回線を利用した測定データの送受信、クラウドを使った測定データの解析
研究者紹介






