

KAITモビリティリサーチキャンパスの構築
テーマの狙い
自ら考えて行動するモビリティたちが学内を動き回り、生活や学びを豊かで楽しい物にする。そんな未来への実験が「KAITモビリティリサーチキャンパス」である。通信技術や情報技術など高度なインフラを備えたキャンパスの中で、さまざまな役割を持ったモビリティたちが日々考え、行動する。学生や教職員はモビリティを使い、触れ合い、見守られると同時に、自ら新たなモビリティ作りに挑戦し、キャンパスで実験することができる。研究成果は広く情報発信すると同時に社会実装を行っていく。
近年、国連では、未来への行動計画としてSDGs(持続可能な開発目標)が策定され、「住み続けられるまちづくりを」「質の高い教育をみんなに」「産業と技術革新の基盤をつくろう」が挙げられている。「KAITモビリティリサーチキャンパス」は、これらの姿のいち早い実現を目指す。
実現アプローチ
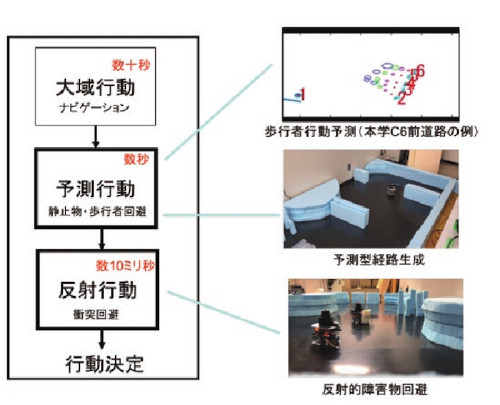
「KAITモビリティリサーチキャンパス」では、人工知能技術、センサ・認識技術、通信技術、などさまざまな技術が「階層型移動知能アーキテクチャ」(図2)のもとに統合される。周辺状況、モビリティ状態、移動目的に応じて、複数の階層で構成される移動知能が適切に判断し、行動する。このアーキテクチャを基にして、さまざまな役割を持ったモビリティが活躍する。同時に必要となるインフラを導入し、キャンパス自体の成長を図る。
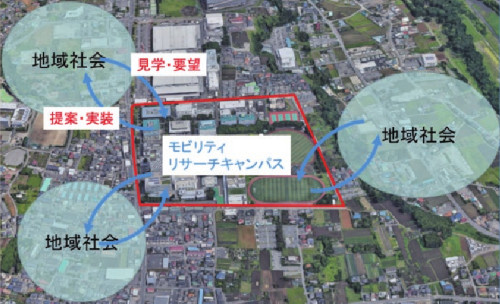
モビリティは開発段階から学内を走行するため、地域社会からのフィードバックや実験実施が容易である(図3)。キャンパスを未来の街のショーケースとすることで、地域との連携構築を目指す。
先進AI教育
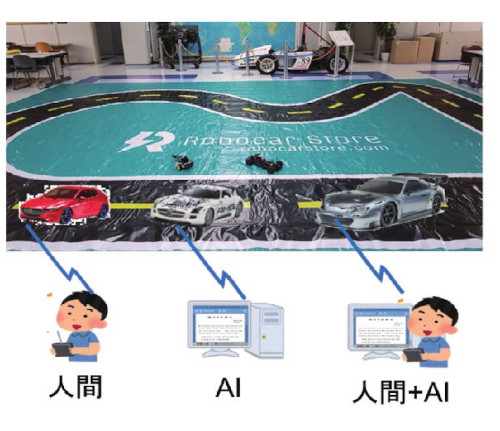
モビリティやキャンパスの成長と同時に、学生自身が成長するための教育教材も並行して開発する。模型のモビリティを用いてレースを開催し、人間に勝てる AIドライバ、人間と協調する AIドライバを開発する。開発した先進 AI 技術を上記で開発するモビリティに組み込むことで、移動知能のレベルアップを図る。
研究者紹介










