

第一期テーマ 成果概要先進ロボットの開発
パートナーロボットの開発
ロボット・メカトロニクス学科 兵頭和人教授
制御システム浄化用等身大2足歩行ロボット
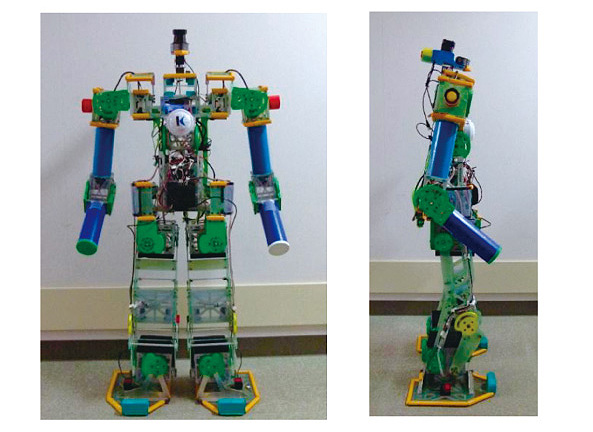
生活支援ロボットやオリンピック聖火ランナーへの応用を目指した、等身大2足歩行ロボット(安定した歩行、起き上がり動作が可能、登坂能力)の開発を行った。5節リンク機構を用いた膝ユニットの開発及び片流れ路面対応制御システムの開発を行い、リハーサルを行うことなく多様な路面(一般公道を含む)での安定した歩行を実現できており、エンターテインメント・ロボットとして高い評価を受けた。
2015年8月1日に行われた厚木市「あゆ祭り」で、オープニングパレードへ参加し、警察当局から許可を受けた公道区間300[m]を完走した。長時間動作(1時間)に対する評価実験及び測域センサを用いた中央緑地公園での自律走行試験も実施している。
ロボットの特徴
1)平行リンク脚による安定した歩行(KAIT工房の外周を約15分で歩行)
2)起き上がり動作が可能(等身大ロボットで、起き上がり機能を有するシステムはほとんど存在しない)
"" 3)登坂能力:5[度]
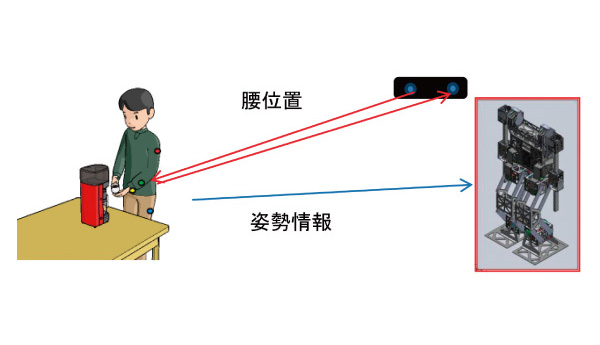
行動トレース機能
(教示した人物の動作を再現するためのシステム)
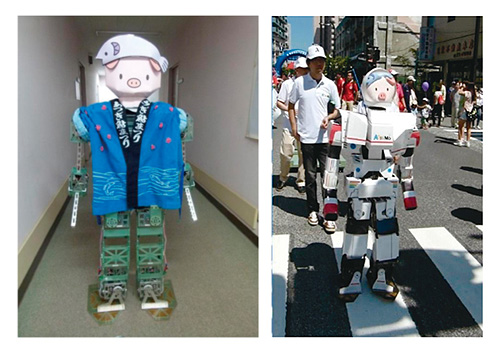
(左)試作ロボットによる厚木市“ゆるきゃら”
(右)あゆ祭り開会式・オープニングパレード
(右)あゆ祭り開会式・オープニングパレード
計測システム
14個の慣性計測センサーから得られるデータに対して、クォータニオン演算を施し、上腕部、前腕部、手首部、大腿部、脛部、足部、頭部の姿勢を算出。
体格差を吸収するシステム
教示者とロボットの体格(リンク長、関節配置)を吸収するために腰を基準とした手先、足先の相対位置を一致させる変換を施し、ロボット側で教示者の動きを再現する。
制御システム
重心位置変化を伴う教示者の動き(特に腕部)へ対応するために、ロボットの重心位置を補正し姿勢の保持を行う。
研究者紹介




