

第二期テーマ 成果概要
新車両運動制御コンテンツの開発
自動車システム開発工学科 山門 誠教授
自動車システム開発工学科 井上秀雄教授、岡崎昭仁准教授、藤澤 徹准教授、川口隆史助教、狩野芳郎助教
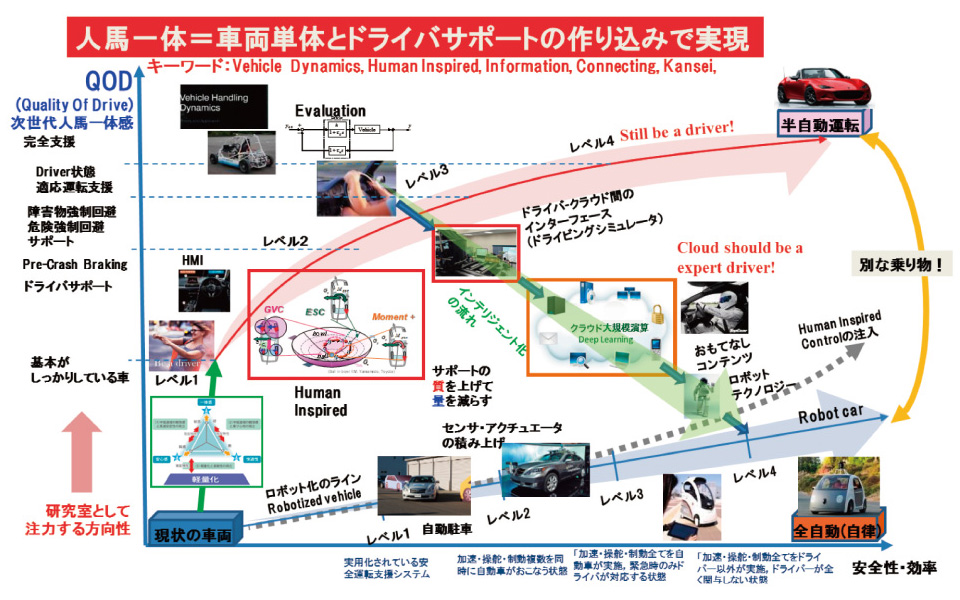
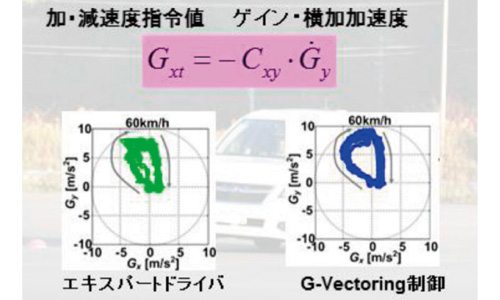
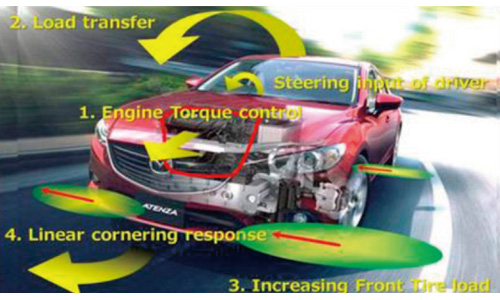
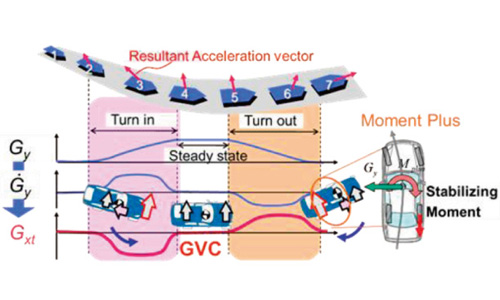
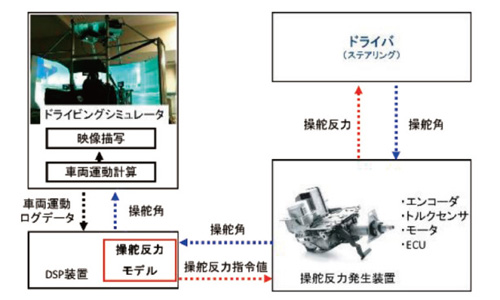
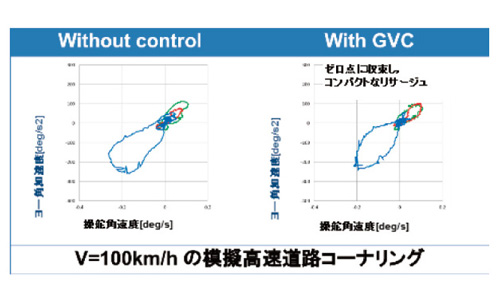
自動車に乗った人の感性・心と、自動車に関する物理法則(インテリジェントな馬の特性)の両方を深く理解することにより、次世代の「人馬一体感」の創造を目指した研究を行います。具体的には、違和感のない車両運動制御、ドライバの能力を最大限引き出す車両諸元等を見出します。




今後の展開
◆S-イノベ「高齢者の自立を支援し安全安心社会を実現する自律運転知能システム」に参画、自律運転コンテンツに人馬一体感コンセプトを導入し、「乗る価値のある自動運転」を目指す。
◆学生フォーミュラ(EV)車両、ソーラーカーにも、 GVC、MPC を搭載し大会へ参加。希望する各学校に技術供与を積極的に進める。本学のプレゼンス向上とともに、競技プロジェクトのレベル向上、ディファクト化を目指す。
研究者紹介









