

車両操舵特性評価手法の高精度化および一般化(通称:τ(タウ)L評価オープン・イノベーション)
実現する未来
■事故を起こしにくい車、酔いにくい車の開発(自動運転時代に向けて)
■日本自動車産業全体のオープン・イノベーション化(電気自動車時代に向けて)
社会的背景・課題
人間中心の開発思想に基づいて開発されたG-ベクタリングコントロール(GVC※)という自動車制御技術をご存じでしょうか。神奈川工科大学で生まれたこの技術は、運転時にドライバや同乗者にかかるGの変化を滑らかにしてくれます。例えば、レーンチェンジ時にGVCが作動すると、Gの変化が滑らかになり、頭や体の揺れが抑制されて快適なドライブを楽しむことができます。
GVCが効いていると「運転しやすい・乗り心地が良い」と話すドライバが多くいます。しかし、GVCが制御する加速度は、人間の感知できるしきい値である0.05G以下のため、加速度の違いを実際に感じることは不可能です。人間が感じている「差」を生む何かを知り、それを自動車や装備品の開発に活かすことができれば、「運転しやすい車」「乗り心地の良い車」を開発できると考えられます。
※G-ベクタリングコントロール(GVC)は、日立オートモティブシステムズ(株)の登録商票です。
課題解決に向けた研究解決
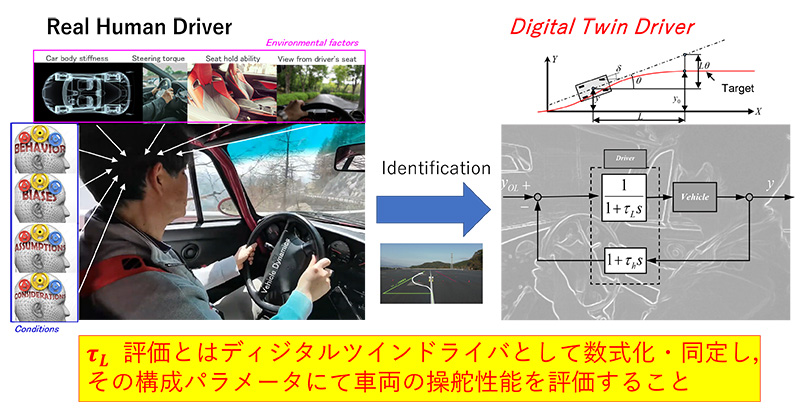
運転のしやすさ・乗り心地の良さを物理的な「値」として計測しようとしても、アンジュレーション(路面のうねりや凸凹)に埋もれてしまい、計測は困難です。そこで目を付けたのが「質」の等価的計測です。自動車の操舵特性を評価するパラメータとして「ドライバ前方予見時間(τ(タウ)h)」「ゲイン(h)」「ドライバ遅れ時間(τL)」という3つのパラメータがあります。質の計測で重要なのはτLです。これまでの研究からτLが大きいほど運転しやすい車であることが実証されています(ドライバが遅れて操作してもタスクがこなせる)。
τLを評価するためにはデジタルツイン技術がカギとなってきます。実際のドライバの運転操作を元にデジタルの世界にドライバモデルを構築し、そのモデルを使って走行実験を行うことでτLを評価することができます。例えば、Gの変化が起きやすいレーンチェンジ走行を実際のドライバが行います。その走行軌跡をドライバモデルでたどるように3つのパラメータを調整すると、例えばGVCなどの制御が作動しているか、していないかで操作が変わります。制御が作動している状態のτLが大きくなり、ドライバの「運転しやすい」という評価と一致していることを実験で確認しています。
τL評価はGVC等の自動車制御技術だけではなく、車種の違い(シートの座り心地、視認性等)にも適用できるため、車体や装備品等の開発にも役立てられています。神奈川工科大学では長年の実証実験を通じて「τL同定マニュアル」を作成してきました。今後は、日本の自動車産業の技術力向上に貢献するため、希望メーカーに対して「τL同定マニュアル」を開示することを考えています。また、τL計測・評価用デモンストレーション機を開発し、オペレータとパックにして希望メーカーへ貸出すことも考えています。これらの活動を通じ、本学を中心としたオープン・イノベーション化を目指します。
特許・研究助成・受賞等
・ASME(The American Society of Mechanical Engineers) The William F. Milliken Invited Lecture Award 2018
Professor Emeritus, Masato ABE
Driver Model Based Handling Quality Evaluation and Effects of Vehicle Body Motion on Handling Quality
Improvement with G-Vectoring Control (GVC)
研究者紹介






